하모닉 유성 프레임리스 로봇 조인트 모터
하모닉 조인트 모터
HONPINE 하모닉 드라이브 조인트 모터는 고정밀, 높은 토크, 큰 중공 코어 직경이 특징이며, 공간이 제한된 응용 분야에 솔루션을 제공하는 경우가 많습니다. 맞춤 제작을 지원하며, 이러한 모터는 특수 로봇 분야에서 자주 사용됩니다.
 STO 탑재 고정밀 엔코더 로봇용 하모닉 기어 모터HAG 로봇용 하모닉 기어 모터는 로봇 응용 분야를 위해 특별히 설계된 로봇 관절 액추에이터입니다. 내장 드라이버는 기어 모터 베이스에 통합되어 있으며, 고속 측 20비트 해상도와 출력 측 19비트 해상도의 고정밀 엔코더가 장착되어 완전 폐루프 제어를 구현합니다. 장비의 보다 안전한 작동을 보장하기 위해 STO 및 브레이크 기능을 옵션으로 사용할 수 있습니다.세부 정보
STO 탑재 고정밀 엔코더 로봇용 하모닉 기어 모터HAG 로봇용 하모닉 기어 모터는 로봇 응용 분야를 위해 특별히 설계된 로봇 관절 액추에이터입니다. 내장 드라이버는 기어 모터 베이스에 통합되어 있으며, 고속 측 20비트 해상도와 출력 측 19비트 해상도의 고정밀 엔코더가 장착되어 완전 폐루프 제어를 구현합니다. 장비의 보다 안전한 작동을 보장하기 위해 STO 및 브레이크 기능을 옵션으로 사용할 수 있습니다.세부 정보 토크 센서 및 일체형 케이블 커넥터가 포함된 휴머노이드 로봇 하모닉 조인트 모듈TCHL 하모닉 조인트 모듈은 토크 센서를 하모닉 드라이브 감속기에 직접 통합한 하모닉 조인트 모듈입니다. 토크 센서는 구동 시스템의 작동 상태와 필요한 토크 값을 정밀하게 측정할 수 있어 액추에이터의 부하를 정확하게 감지할 수 있습니다. 이는 과부하를 방지하고 보다 안전한 인간–로봇 상호작용을 가능하게 합니다.
토크 센서 및 일체형 케이블 커넥터가 포함된 휴머노이드 로봇 하모닉 조인트 모듈TCHL 하모닉 조인트 모듈은 토크 센서를 하모닉 드라이브 감속기에 직접 통합한 하모닉 조인트 모듈입니다. 토크 센서는 구동 시스템의 작동 상태와 필요한 토크 값을 정밀하게 측정할 수 있어 액추에이터의 부하를 정확하게 감지할 수 있습니다. 이는 과부하를 방지하고 보다 안전한 인간–로봇 상호작용을 가능하게 합니다.
이 모듈은 케이블과 커넥터가 완전히 통합되어 있어 빠르고 정밀한 부품 연결이 가능하며, 고도로 통합된 설계를 통해 안전하고 반응성이 뛰어난 모션 제어를 구현합니다.세부 정보 코봇 로봇 암 T형 하모닉 회전 조인트 모듈T형 하모닉 조인트 모듈은 하모닉 감속기, 토크 모터, 정밀 센서, 브레이크, 드라이버를 결합한 고집적 로봇 조인트 유닛입니다. 출력 플랜지가 모터 샤프트에 수직으로 배치되어 로봇의 회전 조인트에 이상적인 T자형 레이아웃을 형성하기 때문에 “T-type”이라고 불립니다.
코봇 로봇 암 T형 하모닉 회전 조인트 모듈T형 하모닉 조인트 모듈은 하모닉 감속기, 토크 모터, 정밀 센서, 브레이크, 드라이버를 결합한 고집적 로봇 조인트 유닛입니다. 출력 플랜지가 모터 샤프트에 수직으로 배치되어 로봇의 회전 조인트에 이상적인 T자형 레이아웃을 형성하기 때문에 “T-type”이라고 불립니다.
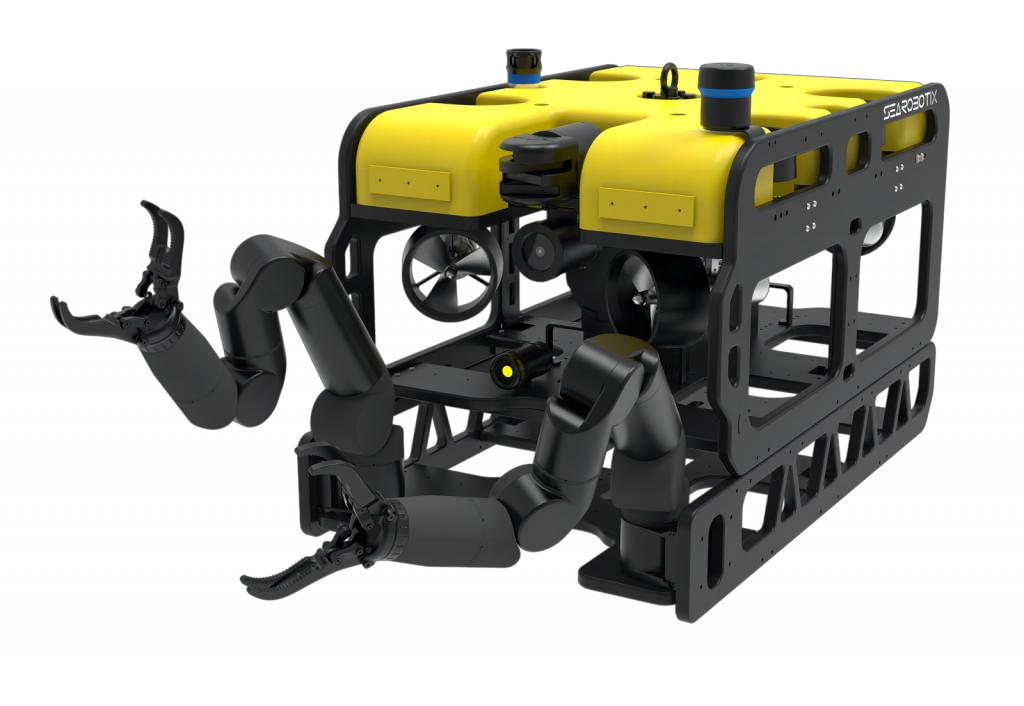
협동 로봇용으로 설계된 이 모듈은 핵심 구성요소를 하나의 소형 플러그 앤 플레이 유닛에 통합하여 개발을 단순화합니다. 이는 개발 주기를 크게 단축하고 비용을 절감하며, 로봇 암 구축을 거의 LEGO 블록을 조립하는 것만큼 쉽게 만들어 줍니다. 또한 높은 집적도는 유지보수 효율을 향상시키고 로봇 암 기술의 적용 범위를 확장합니다.세부 정보 수중 작업용 특수 로봇용 씰링 설계 로봇 조인트 모듈이 조인트 모듈은 하모닉 감속기, 프레임리스 토크 모터, 브레이크, 엔코더 및 드라이버를 포함한 완전 통합형 구성요소를 통해 부피와 중량을 고도로 최적화하여, 더 큰 토크 출력, 더 고정밀, 더 컴팩트한 크기 및 더 가벼운 중량으로 정밀한 모션 제어를 가능하게 합니다. 또한 맞춤형 적용 및 특수 운용 환경에 대한 구체적인 요구 사항을 충족하기 위해 맞춤형 솔루션도 제공하며, 가장 일반적인 맞춤 옵션은 방수 버전(물 튐, 분사 또는 수심 1 미터까지의 수중 작업에 견딜 수 있음) 및 저온 대응입니다. 이 방수 조인트 모듈은 수중에서 작업하는 특수 로봇을 위해 특별히 설계되었으며, 로봇 조인트의 방수 과제를 해결하기 위한 전용 개선이 적용된 당사의 표준 조인트 모듈의 강화 버전으로 개발되었습니다.세부 정보
수중 작업용 특수 로봇용 씰링 설계 로봇 조인트 모듈이 조인트 모듈은 하모닉 감속기, 프레임리스 토크 모터, 브레이크, 엔코더 및 드라이버를 포함한 완전 통합형 구성요소를 통해 부피와 중량을 고도로 최적화하여, 더 큰 토크 출력, 더 고정밀, 더 컴팩트한 크기 및 더 가벼운 중량으로 정밀한 모션 제어를 가능하게 합니다. 또한 맞춤형 적용 및 특수 운용 환경에 대한 구체적인 요구 사항을 충족하기 위해 맞춤형 솔루션도 제공하며, 가장 일반적인 맞춤 옵션은 방수 버전(물 튐, 분사 또는 수심 1 미터까지의 수중 작업에 견딜 수 있음) 및 저온 대응입니다. 이 방수 조인트 모듈은 수중에서 작업하는 특수 로봇을 위해 특별히 설계되었으며, 로봇 조인트의 방수 과제를 해결하기 위한 전용 개선이 적용된 당사의 표준 조인트 모듈의 강화 버전으로 개발되었습니다.세부 정보 대구경 중공 보어 하모닉 드라이브 로터리 액추에이터대구경 중공 보어 로터리 액추에이터는 일반적으로 내부 로터 프레임리스 토크 모터를 하모닉 드라이브 감속기, 절대 엔코더, 맞춤형 대구경 중공 보어 하모닉 드라이브 유닛과 같은 구성 요소와 통합하여 완전한 로터리 액추에이터 어셈블리를 형성합니다. 그 제어 유닛(드라이브 시스템)은 보통 외부 장착되며, 연결된 장비에 대해 고정밀 모션 제어를 가능하게 합니다. 표준 로터리 액추에이터와 비교할 때, 이 시리즈는 더 큰 중공 보어 직경이 특징이며, 리드 스크루, 케이블 및 기타 구성 요소가 통과할 수 있습니다. 이는 대형 관통 보어 공간, 고정밀, 콤팩트한 통합이 필요한 공작기계 로터리 테이블, 정밀 의료기기, 5축 레이저 절단 시스템 및 반도체 장비와 같은 응용 분야를 위해 설계되었습니다.세부 정보
대구경 중공 보어 하모닉 드라이브 로터리 액추에이터대구경 중공 보어 로터리 액추에이터는 일반적으로 내부 로터 프레임리스 토크 모터를 하모닉 드라이브 감속기, 절대 엔코더, 맞춤형 대구경 중공 보어 하모닉 드라이브 유닛과 같은 구성 요소와 통합하여 완전한 로터리 액추에이터 어셈블리를 형성합니다. 그 제어 유닛(드라이브 시스템)은 보통 외부 장착되며, 연결된 장비에 대해 고정밀 모션 제어를 가능하게 합니다. 표준 로터리 액추에이터와 비교할 때, 이 시리즈는 더 큰 중공 보어 직경이 특징이며, 리드 스크루, 케이블 및 기타 구성 요소가 통과할 수 있습니다. 이는 대형 관통 보어 공간, 고정밀, 콤팩트한 통합이 필요한 공작기계 로터리 테이블, 정밀 의료기기, 5축 레이저 절단 시스템 및 반도체 장비와 같은 응용 분야를 위해 설계되었습니다.세부 정보 고도로 통합된 컴팩트 하모닉 드라이브 로봇 관절 모터로봇 조인트 모터는 하모닉 드라이브, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이브 유닛을 포함한 통합 구성요소를 통해 고정밀 모션 제어를 구현하며, 크기와 중량이 최적화되어 있습니다. 더 큰 토크, 더 고정밀, 더 컴팩트한 크기와 더 가벼운 중량을 제공합니다. 또한 고객의 구체적인 요구사항에 따라 맞춤형 서비스도 제공합니다.
고도로 통합된 컴팩트 하모닉 드라이브 로봇 관절 모터로봇 조인트 모터는 하모닉 드라이브, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이브 유닛을 포함한 통합 구성요소를 통해 고정밀 모션 제어를 구현하며, 크기와 중량이 최적화되어 있습니다. 더 큰 토크, 더 고정밀, 더 컴팩트한 크기와 더 가벼운 중량을 제공합니다. 또한 고객의 구체적인 요구사항에 따라 맞춤형 서비스도 제공합니다.
로봇 조인트 모터는 일반적으로 DC24V~DC48V의 넓은 전압 범위를 지원합니다. 로봇 산업의 핵심 부품으로서, 로봇 조인트 모터의 기술 발전은 앞으로도 특수 로봇과 휴머노이드 로봇이 더 높은 유연성과 더 폭넓은 적용 시나리오로 발전하는 것을 지속적으로 촉진할 것입니다. 로봇 분야를 넘어, 로봇 조인트 모터는 반도체 장비, 광발전 장비, 정밀 의료 장비, 3C 장비, 광학 검사 장비 및 기타 분야에도 적용됩니다.세부 정보






유성 조인트 모터
유성 조인트 모터 역시 로봇 동력 시스템의 핵심 구성 요소입니다. 하모닉 조인트 모듈과 비교하면 감속비는 더 작고, 출력 속도는 더 높으며, 강성은 더 크지만, 전체 출력 정밀도는 약간 낮습니다. 유성 감속기, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이버를 포함한 고집적 구성품을 통해 크기와 중량이 크게 최적화되어 정밀한 조인트 모션 제어를 실현합니다. 그 결과 더 높은 토크, 더 컴팩트한 크기, 더 가벼운 중량을 제공합니다. 유성 조인트 모터는 일반적으로 넓은 전압 범위를 지원하며, 저전압 DC 24V~48V에 적응합니다. 또한 고객의 개별 요구 사항에 따라 맞춤형 솔루션도 제공합니다.
 중장비 방폭 로봇 개 조인트 액추에이터HONPINE의 중장비 방폭형 행성 관절 액추에이터가 공식적으로 양산에 들어갔습니다. 이 시리즈의 관절은 이미 여러 사족보행 로봇(로봇견) 플랫폼에 성공적으로 통합되어 석유화학 공장, 천연가스 점검 현장, 긴급 구조 작업과 같은 위험 환경에 배치되었습니다—이러한 영역은 이전에 인력이나 수입 부품에 크게 의존해 왔습니다.
중장비 방폭 로봇 개 조인트 액추에이터HONPINE의 중장비 방폭형 행성 관절 액추에이터가 공식적으로 양산에 들어갔습니다. 이 시리즈의 관절은 이미 여러 사족보행 로봇(로봇견) 플랫폼에 성공적으로 통합되어 석유화학 공장, 천연가스 점검 현장, 긴급 구조 작업과 같은 위험 환경에 배치되었습니다—이러한 영역은 이전에 인력이나 수입 부품에 크게 의존해 왔습니다.
Application-Specific Integration Support: 다양한 로봇 구성과 임무 요구 사항에 맞춰 맞춤형 기계 구조와 제어 파라미터를 제공합니다.
Explosion-Proof Certification Assistance: 인증 절차 전반에 걸친 지원을 제공하여 고객이 흔히 발생하는 설계 오류를 피하고 규제 준수를 가속화할 수 있도록 돕습니다.
Rapid Technical Support: 전국 주요 산업 지역에 기술 서비스 센터를 운영하여 48 hours 이내 현장 대응을 제공합니다.세부 정보 최고 토크 출력 경량 유성 관절 모듈HONPINE PA 시리즈 유성 조인트 모듈은 3건의 독점 발명 특허와 7건의 실용신안 특허를 보유하고 있습니다. 정교한 구조 설계를 통해 동급 제품 중 가장 높은 토크 출력을 구현하여 강력하고 안정적인 성능을 제공합니다.
최고 토크 출력 경량 유성 관절 모듈HONPINE PA 시리즈 유성 조인트 모듈은 3건의 독점 발명 특허와 7건의 실용신안 특허를 보유하고 있습니다. 정교한 구조 설계를 통해 동급 제품 중 가장 높은 토크 출력을 구현하여 강력하고 안정적인 성능을 제공합니다.
HONPINE는 풍부한 제품 리소스와 기술 지원을 제공하여 다양한 적용 시나리오에서 신속한 배치를 가능하게 하고, 프로젝트 사전 연구 단계에서 필요한 시간, 노력, 비용을 크게 절감합니다.
이 모듈은 전력 및 신호 공유 입력/출력 설계를 채택하여 구동 유닛 간 연결을 크게 단순화합니다. 중공 관통 배선 구조와 결합되어 구동 유닛의 적용 및 통합이 더욱 편리하고 효율적입니다.세부 정보 고속 충격 저항 소형 경량 유성 관절 모듈표준 유성 조인트 모듈은 로봇 동력 시스템의 핵심 구성 요소입니다. 유성 감속기, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이버를 결합한 고도의 통합 설계를 통해 부피와 중량을 크게 최적화하여 조인트의 정밀한 모션 제어를 구현합니다. 그 결과 더 큰 토크, 더 작은 크기, 더 가벼운 무게를 실현합니다. 하모닉 조인트 모듈과 비교했을 때, 유성 조인트 모듈은 더 작은 감속비, 더 높은 출력 속도, 더 큰 토크 밀도를 갖추고 있어 중저부하 응용 분야에 더욱 적합합니다. 또한 고객의 구체적인 요구 사항에 맞춘 맞춤형 서비스도 제공합니다.
고속 충격 저항 소형 경량 유성 관절 모듈표준 유성 조인트 모듈은 로봇 동력 시스템의 핵심 구성 요소입니다. 유성 감속기, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이버를 결합한 고도의 통합 설계를 통해 부피와 중량을 크게 최적화하여 조인트의 정밀한 모션 제어를 구현합니다. 그 결과 더 큰 토크, 더 작은 크기, 더 가벼운 무게를 실현합니다. 하모닉 조인트 모듈과 비교했을 때, 유성 조인트 모듈은 더 작은 감속비, 더 높은 출력 속도, 더 큰 토크 밀도를 갖추고 있어 중저부하 응용 분야에 더욱 적합합니다. 또한 고객의 구체적인 요구 사항에 맞춘 맞춤형 서비스도 제공합니다.
표준 유성 조인트 모듈은 고속 성능, 내충격성, 콤팩트한 경량 설계와 같은 핵심 장점을 바탕으로 휴머노이드 로봇, 특수 로봇, 물류 AGV, 산업 자동화 분야의 고부하 구동을 위한 선호 솔루션이 되었으며, 로봇 성능의 발전과 더 폭넓은 응용 시나리오를 이끌고 있습니다.세부 정보



프레임리스 토크 모터
프레임리스 토크 모터는 영구 자석 동기 모터 (PMSM)의 특수한 유형으로, 로터와 스테이터의 두 가지 핵심 구성 요소로 이루어져 있으며, 하우징, 베어링, 샤프트와 같은 기존 모터 구조를 제거한 것이 특징입니다. 고객의 기계 시스템에 직접 통합되도록 설계되었기 때문에 최종 사용자가 지지 베어링과 인클로저를 제공해야 합니다. 이러한 설계 철학은 더 높은 유연성, 더 컴팩트한 크기, 더 우수한 성능을 제공하여 공간, 중량, 동적 성능에 대한 요구가 엄격한 응용 분야에 이상적입니다. 휴머노이드 로봇 조인트 구동, 정밀 회전 스테이지, 의료 장비, 산업 자동화 시스템을 포함한 고정밀, 고동적 응답 시나리오에서 탁월한 성능을 발휘합니다.프레임리스 토크 모터는 구조 구성에 따라 내전형 프레임리스 모터와 외전형 프레임리스 모터로 다시 분류됩니다.
 FM2 로봇용 고토크 밀도 프레임리스 모터로봇용 HONPINE FM2 프레임리스 토크 모터는 FM1 시리즈에 비해 더 높은 성능과 더 다양한 구성 옵션을 제공하여 더 넓은 범위의 애플리케이션에 적합합니다. FM1 모터에 비해 모터 손실은 20% 감소하고 토크 출력은 10% 증가하여 작동 지속 시간이 연장됩니다.
FM2 로봇용 고토크 밀도 프레임리스 모터로봇용 HONPINE FM2 프레임리스 토크 모터는 FM1 시리즈에 비해 더 높은 성능과 더 다양한 구성 옵션을 제공하여 더 넓은 범위의 애플리케이션에 적합합니다. FM1 모터에 비해 모터 손실은 20% 감소하고 토크 출력은 10% 증가하여 작동 지속 시간이 연장됩니다.
FM2 시리즈는 φ50mm부터 φ127mm까지 6가지 직경으로 제공되며, 정격 속도는 1800 rpm부터 5500 rpm까지, 토크는 0.36 Nm부터 6.40 Nm까지, 출력은 207 W부터 608 W까지입니다. 정격 전압 범위는 24 V부터 70 V까지입니다. 옵션 구성에는 홀 센서, 온도 센서, 맞춤형 리드선 옵션이 포함됩니다.이 모터는 협동 로봇, 휴머노이드 로봇, 4족 보행 로봇, 산업용 로봇, 의료 재활 로봇에 널리 사용됩니다.세부 정보 모터") FM1 비용 효율적인 프레임리스 브러시리스 DC (BLDC) 모터HONPINE FM1 프레임리스 브러시리스 DC (BLDC) 모터는 컴팩트하고, 고성능이며, 비용 효율적인 제품입니다. 네 가지 크기(φ50mm–φ115mm)로 제공되며, 정격 속도는 650 rpm에서 5250 rpm까지, 토크는 0.3 Nm에서 9.32 Nm까지, 출력은 165 W에서 920 W까지입니다. 정격 전압은 24 V에서 70 V까지이며, Hall 센서, 온도 센서 및 배선 구성을 선택할 수 있습니다. 협동 로봇, 휴머노이드 로봇, 사족 보행 로봇 및 의료 재활 로봇에 널리 사용됩니다.세부 정보
FM1 비용 효율적인 프레임리스 브러시리스 DC (BLDC) 모터HONPINE FM1 프레임리스 브러시리스 DC (BLDC) 모터는 컴팩트하고, 고성능이며, 비용 효율적인 제품입니다. 네 가지 크기(φ50mm–φ115mm)로 제공되며, 정격 속도는 650 rpm에서 5250 rpm까지, 토크는 0.3 Nm에서 9.32 Nm까지, 출력은 165 W에서 920 W까지입니다. 정격 전압은 24 V에서 70 V까지이며, Hall 센서, 온도 센서 및 배선 구성을 선택할 수 있습니다. 협동 로봇, 휴머노이드 로봇, 사족 보행 로봇 및 의료 재활 로봇에 널리 사용됩니다.세부 정보 FMK 고집적 로봇 관절용 프레임리스 토크 모터프레임리스 토크 모터는 기존 서보 모터와 달리 고정자와 회전자 구성품으로만 이루어져 있습니다. 프레임이 있는 모터와 비교하여, 프레임리스 모터는 유연한 구성과 간편한 설치를 제공합니다. 고집적 구동 시스템의 증가 추세를 고려할 때, 프레임리스 모터는 엔지니어의 기대에 더 잘 부합합니다. 엔지니어는 시스템 설계에서 더 이상 모터 인터페이스를 고려할 필요가 없으므로, 구동 시스템에서 동력 출력 장치가 차지하는 공간을 최대한 줄일 수 있어 시스템 통합도가 높아집니다.HONPINE FMK 프레임리스 토크 모터는 현재 협동 및 양팔 로봇의 J1–J6 관절, 사족보행 로봇의 보행 관절, 휴머노이드 로봇의 유연 관절에 널리 사용되고 있습니다.세부 정보
FMK 고집적 로봇 관절용 프레임리스 토크 모터프레임리스 토크 모터는 기존 서보 모터와 달리 고정자와 회전자 구성품으로만 이루어져 있습니다. 프레임이 있는 모터와 비교하여, 프레임리스 모터는 유연한 구성과 간편한 설치를 제공합니다. 고집적 구동 시스템의 증가 추세를 고려할 때, 프레임리스 모터는 엔지니어의 기대에 더 잘 부합합니다. 엔지니어는 시스템 설계에서 더 이상 모터 인터페이스를 고려할 필요가 없으므로, 구동 시스템에서 동력 출력 장치가 차지하는 공간을 최대한 줄일 수 있어 시스템 통합도가 높아집니다.HONPINE FMK 프레임리스 토크 모터는 현재 협동 및 양팔 로봇의 J1–J6 관절, 사족보행 로봇의 보행 관절, 휴머노이드 로봇의 유연 관절에 널리 사용되고 있습니다.세부 정보 컴팩트 경량 고출력 밀도 내부 로터 프레임리스 토크 모터내부 로터 프레임리스 토크 모터는 로터와 스테이터의 두 핵심 구성 요소로 이루어진 특수한 유형의 영구 자석 동기 모터 (PMSM)입니다. 로터는 내부에 배치되고, 스테이터는 외부에 장착됩니다. 이 혁신적인 설계는 기존 모터 하우징, 베어링 및 샤프트를 제거하고 로터 및 스테이터 어셈블리만 남깁니다. 로터는 일반적으로 영구 자석이 통합된 링형 구조를 채택하며, 부하 샤프트에 직접 장착됩니다. 스테이터는 구리 권선과 적층판으로 구성되며, 전자기력을 생성하여 로터 회전을 구동합니다. 이러한 구성은 효율적인 자기장 상호작용을 통해 토크 출력을 구현하므로 로봇 관절 및 산업 자동화와 같은 고정밀 응용 분야에 이상적입니다. 직접 부하 구동을 가능하게 하여 기계식 전달 손실을 최소화합니다.세부 정보
컴팩트 경량 고출력 밀도 내부 로터 프레임리스 토크 모터내부 로터 프레임리스 토크 모터는 로터와 스테이터의 두 핵심 구성 요소로 이루어진 특수한 유형의 영구 자석 동기 모터 (PMSM)입니다. 로터는 내부에 배치되고, 스테이터는 외부에 장착됩니다. 이 혁신적인 설계는 기존 모터 하우징, 베어링 및 샤프트를 제거하고 로터 및 스테이터 어셈블리만 남깁니다. 로터는 일반적으로 영구 자석이 통합된 링형 구조를 채택하며, 부하 샤프트에 직접 장착됩니다. 스테이터는 구리 권선과 적층판으로 구성되며, 전자기력을 생성하여 로터 회전을 구동합니다. 이러한 구성은 효율적인 자기장 상호작용을 통해 토크 출력을 구현하므로 로봇 관절 및 산업 자동화와 같은 고정밀 응용 분야에 이상적입니다. 직접 부하 구동을 가능하게 하여 기계식 전달 손실을 최소화합니다.세부 정보

 모터")


하모닉 드라이브 로봇 조인트 모터란 무엇입니까?
하모닉 조인트 모터는 하모닉 드라이브, 프레임리스 토크 모터, 브레이크, 엔코더, 드라이브 유닛을 포함한 일체형 구성품을 통해 매우 정밀한 모션 제어를 실현하며, 크기와 중량이 최적화되어 있습니다.HONPINE 하모닉 조인트 모터는 듀얼 엔코더, STO (Safe Torque Off), 홀딩 브레이크, 일체형 토크 센서를 포함한 다양한 응용 요구를 충족할 수 있도록 유연한 구성 옵션을 제공합니다.

하모닉 드라이브 로봇 조인트 액추에이터 선정
다양한 시장 수요를 충족하기 위해, HONPINE 하모닉 드라이브 로봇 조인트 모터는 현재 HPJM, TCHL, HAG의 세 가지 주요 시리즈로 구분됩니다.
이 가이드는 비용 관리, 납기, 기본 성능 요구 사항 등의 요소를 바탕으로 귀사의 응용 분야에 가장 적합한 액추에이터를 선택할 수 있도록 초기 개요를 제공합니다.
자세한 선정 및 기술 지원이 필요하시면, 추가 논의를 위해 언제든지 문의해 주시기 바랍니다.
주요 특징
이 시리즈는 5년 이상 시장에 출시되어 있으며, 완전히 개발되고 성숙한 휴머노이드 로봇 조인트 솔루션을 제공합니다. 하모닉 감속기, 드라이버, 엔코더, 프레임리스 토크 모터를 통합하고 있습니다. 듀얼 엔코더 및 브레이크 옵션을 제공합니다. CAN (독자 규격), CANopen, EtherCAT 통신 프로토콜을 지원합니다.
핵심 장점
매우 컴팩트한 설계로, 동등한 성능 요구 사항에서 시스템 통합을 위한 더 많은 공간 확보 가능
옵션인 저온 그리스 적용 가능, -40°C까지의 혹독한 환경에 적합
평균 납기 ≤ 4 weeks, 강력한 생산 능력 보장
응용 분야
안정적이고 신뢰할 수 있는 성능, 빠른 대량 납품, 또는 저온 환경에서의 작동이 요구되는 프로젝트에 이상적입니다.
참고 사항
이 시리즈는 원래 토크 센서 또는 방수 기능을 고려하여 설계되지 않았습니다. 이러한 기능이 필요할 경우 맞춤 제작이 가능하지만, 추가 비용과 더 긴 납기가 예상됩니다.
주요 특징
2025년 말 출시 예정인 이 신규 시리즈는 자체 개발한 하모닉 감속기를 채택하여 더 나은 비용 관리를 가능하게 합니다. 기본으로 듀얼 엔코더 (싱글턴 절대값, 23-bit 해상도)를 제공하며, CAN FD 및 EtherCAT 통신 프로토콜을 지원합니다. 옵션 기능에는 브레이크와 토크 센서가 포함됩니다. 일체형 터미널 하네스는 중공축 케이블 라우팅과 모듈 캐스케이딩을 지원합니다.
핵심 장점
탁월한 비용 경쟁력
전면, 측면, 후면 장착 구성을 지원하여 높은 구조적 유연성 제공
하네스 설계로 손쉬운 시스템 통합 가능
응용 분야
설치 유연성에 대한 요구가 높은 비용 민감형 프로젝트에 이상적입니다.
참고 사항
현재는 101 감속비만 제공됩니다. 전체 감속비 라인업은 2026년 6월에 출시될 예정입니다. 현재 납기는 약 6 weeks입니다.
주요 특징
2026년에 출시된 이 신규 시리즈는 특정 안전 요구 사항을 충족하기 위해 STO (Safe Torque Off) 기능을 탑재했습니다. 국내 선도 브랜드의 하모닉 감속기를 채택하여 높은 제품 신뢰성을 보장합니다. CANopen 및 EtherCAT 통신 프로토콜을 지원하며, 브레이크와 토크 센서는 옵션입니다.
핵심 장점
더 높은 안전 기준 충족
핵심 감속기 부품의 우수한 성능과 신뢰할 수 있는 품질
응용 분야
명확한 안전 요구 사항이 있거나 감속기 신뢰성이 최우선인 프로젝트에 이상적입니다.
참고 사항
새롭게 출시된 시리즈이므로 생산 능력은 아직 확대 중입니다. 현재 납기는 약 8–10 weeks입니다.
로봇 관절 모듈솔루션 및 응용 분야
HONPINE은 오랜 세월 동안 하모닉 로봇 조인트 모터와 유성 조인트 모터를 휴머노이드 로봇, 듀얼 암 로봇, 휠형 로봇, 드론, 농업 기계, 원자력 장비, 산업용 로봇, 산업 자동화 장비를 포함한 다양한 분야에 적용해 왔으며, 이러한 산업에 조인트 모터 솔루션을 제공하고 맞춤 제작도 지원합니다. HPJM, TCHL, HAG 및 기타 시리즈의 로봇 조인트 모터는 실제 서비스에서 얻은 경험을 바탕으로 개발되었습니다.
‹








›

하모닉 조인트 모터의 장점과 단점은 무엇입니까
하모닉 조인트 모터의 장점
초고정밀
최소한의 전달 백래시와 최대 ±0.01 mm의 반복 위치 결정 정밀도를 갖추고 있어, 정밀한 로봇 작업에 필수적입니다.
고감속비
큰 단일 단계 감속비를 통해 컴팩트한 크기에서 높은 토크 출력을 구현하여, 효과적인 “저속, 고부하” 성능을 달성합니다.

극도로 컴팩트한 설계
단순한 구조, 작은 크기, 경량 구조를 갖추고 있어 손목과 손과 같은 공간 제약이 있는 로봇 부품에 매우 적합합니다.
높은 통합성
모터, 엔코더 및 기타 구성요소를 결합한 통합 모듈 형태로 자주 판매되어, 편리한 설치와 유지보수를 가능하게 하면서 모듈식 설계를 지원합니다.
하모닉 조인트 모터의 단점
하모닉 감속기와 하모닉 조인트 모터의 토크 센서는 맞춤형으로 개발되어 가격을 낮추기 어렵습니다. 그러나 가까운 미래에 수요와 생산 능력이 일정 수준에 도달하면 가격이 인하될 수 있습니다.
하모닉 드라이브 로봇 조인트 모듈 - FAQ
HONPINE 하모닉 DC 조인트 모터는 구현형 지능을 위해 특별히 설계된 하모닉 액추에이터입니다. hpjm은 가장 먼저 출시된 하모닉 액추에이터이며, 현재 가장 안정적인 성능과 가장 빠른 납기를 자랑합니다. 고객 요구를 충족하기 위해, 최근 두 가지 새로운 하모닉 DC 조인트 모터인 TCHL과 HAG를 출시했습니다. 최신 제품 브로셔는 당사에 문의해 주십시오.
당사의 하모닉 드라이브 모듈은 고정밀 16-bit 엔코더 해상도를 갖추고 있으며, 회전당 65,536개의 이산 위치를 제공합니다. 이는 전체 360° 회전이 모터 단에서 탁월한 위치 정밀도를 위해 극도로 미세한 증분으로 분할됨을 의미합니다.
HONPINE 표준 로봇 관절 모듈에는 통합 토크 측정 기능이 포함되어 있지 않지만, 외부 토크 센서를 통합하여 토크 감지 요구 사항을 충족할 수 있습니다. 맞춤형 솔루션을 위해 당사 기술 팀에 문의해 주십시오.
당사의 통합 드라이버 시스템의 매우 컴팩트한 설계로 인해, HONPINE 전류 로봇 관절 모듈에는 범용 I/O 핀이 포함되어 있지 않습니다. 이 간소화된 설계는 로봇 응용 분야에서 최적의 공간 절약을 가능하게 합니다.
모든 모듈 변형에 대한 질량 및 부피를 포함한 완전한 기계 사양은 당사의 Model Selection Brochure에서 확인할 수 있습니다. 브로셔는 당사의 자료 섹션에서 다운로드하거나 특정 치수 요구 사항에 대해서는 당사 영업팀에 문의하십시오.
CAN 프로토콜을 기반으로, 단일 모터는 각 송신 및 수신에 0.5ms가 필요합니다. 여러 모터의 경우, 이 시간은 그에 따라 누적됩니다.
기본적으로, 하나의 메인 컨트롤러는 네 개의 모듈을 처리할 수 있습니다. 정상적인 통신 주기는 전송당 0.5ms이지만, 이 간격을 일관되게 유지하지는 않습니다—for instance, 경보 상태 또는 이와 유사한 조건에서는 고주파 샘플링이 필요하지 않습니다.
하모닉 조인트 모듈은 하모닉 감속기의 높은 감속비 (typically 50–160:1) 및 낮은 백래시 (less than 1 arcmin)를 통해 로봇 조인트의 정밀한 위치 및 토크 제어를 실현합니다.
또한, 이 모듈은 엔코더와 토크 센서를 통합하여 ±0.1 N·m의 정확도로 실시간 토크 조정을 가능하게 하므로, 유연하고 순응적인 조립 작업에 매우 적합합니다.
하모닉 조인트 모듈은 로봇 관절의 회전 운동을 지원하며 최대 ±0.001°의 반복 위치 정확도를 달성합니다.
콤팩트한 공간에서 높은 토크 밀도 (>100 N·m/kg)를 제공하여 다음과 같은 응용 분야에 이상적입니다:
휴머노이드 로봇 관절
용접 및 핸들링 로봇
의료 기계
산업 자동화 장비
전기 구동 시스템
서비스 로봇 및 기타 로봇 시스템
중공 샤프트 설계로 케이블, 공압 라인, 또는 신호선을 중심을 통해 통과시킬 수 있어 조인트 직경을 줄이고 케이블 배선을 더 간단하고 신뢰성 있게 만듭니다. 이는 로봇 응용 분야에서 배선 복잡성을 크게 낮추고 전체 시스템 통합을 향상시킵니다.
핵심 매개변수
16-bit 해상도: 모터 1회전당 65,536 펄스.
감속비: 예: 101:1은 모터가 101회전할 때 출력이 1회전함을 의미합니다.
출력 속도
출력 속도 = 모터 속도 ÷ 감속비.
예시: 모터가 1 rev/sec (65,536 pulse/sec)이고 감속비가 101:1인 경우 → 출력은 101초에 1회전을 완료합니다.
단위 변환
Rad/s 변환:
1 rad/s ≈ 57.3 °/s
1 rad/s ≈ 9.55 rpm
Pulse/s ↔ rpm (16-bit 엔코더):
1 rpm ≈ 1092.27 pulse/s
1 pulse/s ≈ 1/1092.27 rpm
참고: 계산은 물리적 관계를 기반으로 합니다. 예를 들어, 1 rad/s = 60/(2π) rpm.
대규모 제조 역량의 지속적인 확대와 끊임없는 기술 혁신을 바탕으로, HONPINE은 신뢰할 수 있고, 대량 생산이 가능하며, 비용 효율적인 제품을 제공하는 데 그치지 않고, 휴머노이드 로봇과 구현형 지능 로봇의 산업화를 가속화하는 것을 목표로 합니다.
HONPINE 하모닉 관절 모터의 특징:
높은 토크 출력
높은 정밀도
높은 감속비
콤팩트한 구조
낮은 소음
낮은 진동
이 제품은 특히 정확도, 힘 제어, 경량 설계에 대한 요구가 매우 높은 로봇 팔 관절에 매우 적합합니다.
대부분의 모델의 경우, HONPINE은 납기를 한 달 이내로 관리할 수 있습니다. 소량의 제품은 주문 수요 급증으로 인해 생산 일정이 조정 중일 수 있습니다. 당사는 생산 능력 확대를 위해 지속적으로 생산 규모를 확장하고 있습니다.
HPJM 하모닉 드라이브 모듈은 다른 안전 방식을 사용합니다. STO 대신, 전원이 차단되면 즉시 회전을 멈추기 위해 자동으로 작동하는 신뢰할 수 있는 내장형 전자기 브레이크 시스템을 적용하여 안전한 작동을 보장합니다.
새로운 2026 HONPINE HAG 하모닉 드라이브 로봇 관절 모터는 STO 기능을 갖추고 있습니다. HAG 시리즈에 대한 더 많은 정보를 얻으려면 당사에 문의하십시오.
예. 멀티턴 절대 엔코더를 사용합니다. 그러나 출력단에 감속기가 있기 때문에, 멀티턴 위치 카운트를 유지하려면 엔코더 배터리가 필요합니다. 사용자 정의를 지원하며, 엔코더 배터리 포함 또는 미포함 모터를 선택할 수 있습니다.
로봇 관절 액추에이터는 하모닉 드라이브 감속기, 서보 모터, 엔코더, 브레이크, 컨트롤러, 정밀 베어링을 하나의 컴팩트한 모듈로 결합한 통합 모션 제어 장치입니다. 하모닉 드라이브 통합 액추에이터, 로봇 구동 관절 모듈, 통합 로봇 관절, 또는 로봇 회전 액추에이터 모듈이라고도 하며, 현대 로봇의 핵심 동력 전달 시스템 역할을 합니다.
모듈식 아키텍처 덕분에 여러 개의 하모닉 기어 관절 모듈을 결합하여 다자유도 로봇 암, 휴머노이드 로봇, 외골격, 서비스 로봇, 맞춤형 자동화 장비를 구축할 수 있습니다.
소형 모델은 다음 분야에 널리 사용됩니다:카메라 짐벌,UAV 및 드론,검사 로봇,의료 기기
대형 모델은 다음 분야에 이상적입니다:산업용 로봇 암,휴머노이드 로봇,협동 로봇,모바일 로봇,물류 로봇
,특수 목적 로봇,CNC 자동화 장비
휴머노이드 로봇의 빠른 발전은 하모닉 로봇 관절 및 로봇 관절 액추에이터의 지속적인 혁신을 이끌고 있습니다. 로봇의 어깨, 팔꿈치, 손목, 허리 및 다리를 위한 핵심 구동 유닛으로서, 최신 하모닉 액추에이터 시스템은 더 가볍고, 더 컴팩트하며, 더 강력해지고 있습니다. 첨단 설계는 무게와 설치 공간을 줄이는 동시에 토크 밀도, 위치 결정 정확도 및 운동 성능을 향상시킵니다. 동시에 최적화된 기어 형상, 고강도 소재, 개선된 윤활, 씰링 및 열 관리는 내구성, 충격 저항성 및 서비스 수명을 향상시킵니다. 이러한 발전은 휴머노이드 로봇이 산업, 서비스 및 연구 응용 분야 전반에서 더 정밀하고, 신뢰할 수 있으며, 인간과 유사한 동작을 수행할 수 있도록 합니다.
고정밀 다중 치 맞물림이 전달 오차를 분산시켜 뛰어난 위치 결정 정확도와 극히 낮은 백래시를 제공합니다.
큰 감속비 단일 단계 감속비는 일반적으로 30:1에서 320:1 범위이며, 맞춤형 설계의 경우 1000:1을 초과합니다.
컴팩트한 크기 기존 기어박스와 비교할 때, 컴팩트한 로봇 관절 모듈은 동등한 토크 출력을 유지하면서도 크기를 크게 줄일 수 있습니다.
높은 통합성 하모닉 드라이브 통합 관절은 모터, 감속기, 엔코더, 브레이크 및 컨트롤러를 하나의 컴팩트한 패키지로 결합하여 설치를 간소화합니다.
부드러운 동작 낮은 치면 미끄럼 속도는 진동과 충격을 최소화하면서 69%에서 96% 사이의 전달 효율을 유지합니다.
하모닉 드라이브 액추에이터는 탁월한 정밀도를 제공하지만, 특정 엔지니어링 한계도 있습니다.
제한적인 충격 저항성
플렉스스플라인은 지속적으로 탄성 변형을 겪기 때문에 하모닉 트랜스미션은 로봇의 점프, 주행 또는 낙하와 같이 빈번한 충격이 발생하는 응용 분야에는 적합성이 낮습니다.
낮은 비틀림 강성
유성 기어박스 또는 RV 감속기와 비교할 때, 하모닉 드라이브는 일반적으로 비틀림 강성이 더 낮습니다.
열 관리 과제
고도로 통합된 액추에이터 설계는 방열을 위한 가용 공간을 줄이므로, 최적화된 냉각 전략이 필요합니다.
감속비 제약
하모닉 드라이브는 일반적으로 약 35:1 미만의 감속비가 필요한 응용 분야에는 권장되지 않습니다.
하모닉 드라이브 액추에이터는 탁월한 정밀도를 제공하지만, 특정 엔지니어링 한계도 있습니다.
제한적인 충격 저항성
플렉스스플라인은 지속적으로 탄성 변형을 겪기 때문에 하모닉 트랜스미션은 로봇의 점프, 주행 또는 낙하와 같이 빈번한 충격이 발생하는 응용 분야에는 적합성이 낮습니다.
낮은 비틀림 강성
유성 기어박스 또는 RV 감속기와 비교할 때, 하모닉 드라이브는 일반적으로 비틀림 강성이 더 낮습니다.
열 관리 과제
고도로 통합된 액추에이터 설계는 방열을 위한 가용 공간을 줄이므로, 최적화된 냉각 전략이 필요합니다.
감속비 제약
하모닉 드라이브는 일반적으로 약 35:1 미만의 감속비가 필요한 응용 분야에는 권장되지 않습니다.
하모닉 드라이브 로봇 액추에이터 모듈을 선택하려면 토크 밀도, 반복 정밀도, 제어 아키텍처, 기계 설계, 통신 성능 및 환경 신뢰성을 포함한 핵심 성능 요소를 평가해야 합니다. 높은 토크 밀도는 전체 시스템 중량을 줄이면서 페이로드 용량을 향상시키며, 정밀 응용 분야에서는 일반적으로 ≤15–20 아크초 수준의 반복 정밀도가 요구됩니다. 고급 모듈은 백래시와 전달 오차를 보정하고 동작 정확도를 향상시키기 위해 이중 절대 엔코더 폐쇄 루프 제어를 채택하는 경우가 많습니다. 중공축 구조는 내부 케이블 라우팅을 가능하게 하여 통합성과 신뢰성을 향상시킵니다. EtherCAT 및 CAN FD와 같은 산업용 통신 프로토콜은 고주파 서보 제어와 함께 빠르고 안정적인 성능을 보장합니다. 또한 신뢰할 수 있는 액추에이터 시스템은 장기적인 산업 안정성을 보장하기 위해 온도 범위, 피로 수명, 과부하, 충격, 진동 및 IP 보호에 대한 엄격한 테스트를 통과해야 합니다.
최신 로봇용 하모닉 액추에이터 기술은 세 가지 주요 발전 방향에 집중하고 있습니다.
경량 일체형 구조
마그네슘 합금, 경량 하우징, 최적화된 기계적 레이아웃을 사용하여 제조업체들은 액추에이터 길이를 줄이는 동시에 지속적으로 중량을 낮추고 있습니다.
더 높은 정밀도와 더 큰 출력 밀도
모터 설계, 하모닉 감속기, 엔코더 해상도, 서보 알고리즘의 지속적인 개선으로 토크 밀도, 위치 결정 정확도, 동적 응답성이 향상되고 있습니다.
향상된 신뢰성
플렉스스플라인 소재, 치형 최적화, 열처리, 씰링 기술, 윤활 시스템의 발전은 까다로운 산업 환경에서의 내구성을 크게 향상시킵니다.
유성 기어 시스템과 RV 감속기의 경쟁이 심화되고 있음에도 불구하고, 하모닉 드라이브 정밀 액추에이터 시스템은 다음이 요구되는 응용 분야에서 여전히 대체하기 어렵습니다:
제로 또는 초저 백래시
높은 위치 결정 정확도
컴팩트한 통합 설계
경량 로봇 조인트
휴머노이드 로봇이 하반신 조인트에 더 높은 충격 저항성을 요구함에 따라, 유성 감속기는 엉덩이와 다리 부위에서 점점 더 보편화되고 있습니다. 그러나 하모닉 드라이브 로봇 모듈은 로봇 팔, 손목, 협동 로봇, 의료 로봇, 서비스 로봇과 같은 정밀도에 민감한 응용 분야에서 계속 우위를 차지하고 있습니다.
하나의 기술이 다른 기술을 대체하기보다는, 업계는 하모닉, 유성, RV 솔루션이 공존하며 다양한 로봇 시스템의 성능을 최적화하는 응용 분야별 구동계 선택으로 나아가고 있습니다.
유성 조인트 모터 - FAQ
JRM 유성 조인트 모터는 HONPINE의 군용 등급 제품으로, 일반적으로 고성능 로봇견에 사용됩니다. 현재 휴머노이드 로봇 바이오닉스를 위해 HPJM 하모닉 조인트 모터가 곧 출시될 예정이며, 더 컴팩트한 설계와 더 큰 중공 캐비티를 특징으로 합니다.
HONPINE 유성 기어 모터의 내부 기어는 고강도 합금강으로 제작되었으며, 침탄 및 담금질 처리를 거쳐 표면 경도 HRC 58–62에 도달합니다. 식품 등급 윤활 그리스와 결합하여, 정격 운전 조건에서 서비스 수명은 10,000시간을 초과하며, 이는 핵심 부품 교체 없이 약 14개월의 연속 산업 운전에 해당합니다.
또한, 이 모터는 IP65 보호 등급의 모듈형 밀봉 설계를 채택하여 먼지와 액체 비말을 효과적으로 차단하므로, 식품 가공 및 자동차 도장과 같은 특수 환경에 적합합니다.
표준화된 인터페이스와 분리형 엔드 캡 설계로 인해 전체 로봇을 분해하지 않고도 유지보수가 가능하며—모듈을 직접 교체할 수 있어 가동 중단 시간과 유지보수 비용을 크게 줄일 수 있습니다.
SCARA 로봇 분류 및 6축 로봇 암 적재 및 하역과 같은 산업용 애플리케이션부터, 재활 훈련 장비 및 수술 로봇 정밀 제어를 포함한 의료용 애플리케이션, 그리고 바이오닉 로봇 보행 시뮬레이션 및 UAV 짐벌 안정화와 같은 소비자급 시장에 이르기까지, 이 모듈은 CAN 및 RS485를 포함한 여러 통신 프로토콜을 지원하여 서로 다른 브랜드의 제어 시스템과 신속하게 호환될 수 있습니다.
더 중요한 것은, 경량 설계와 높은 토크 밀도의 조합이 강력한 애플리케이션 범용성을 만들어낸다는 점입니다:
소형 모델은 UAV 짐벌에 내장될 수 있어, 페이로드를 증가시키지 않으면서 부드러운 360° 회전을 보장합니다.
대형 모델은 AGV 구동 휠에 통합될 수 있어, 중단 없는 창고 및 물류 운영의 요구를 충족하기 위해 24시간 연속 운전을 지원합니다.
산업 제조의 엄격한 정밀도 요구 사항을 충족하기 위해, 이 모듈은 헬리컬 유성 기어 감속 구조를 채택합니다. 최적화된 치면 설계를 통해, 기어 백래시는 10 arcminutes (approximately 0.167°) 이내로 제어되며, 반복 위치 결정 정확도는 ±12 arcminutes에 도달합니다.
3 kHz 고주파 제어 신호와 ≤200 μs의 응답 시간과 결합되어, 이 시스템은 정밀 전자 부품 조립 및 리튬 배터리 탭 용접과 같은 마이크론 수준 작업에서도 지연 또는 위치 결정 오류로 인한 제품 손실을 방지합니다.
고하중 응용 분야를 위해, 이 모듈은 군용 등급 강화 기어 재료와 베어링 구조를 사용합니다. 최대 토크는 36 Nm에 이르고, 정지 토크는 24 Nm를 초과하며, 이는 3.6 kg 하중을 안정적으로 들어 올리는 것과 같습니다. 이는 4족 로봇의 하중 지지 보행과 외골격 로봇의 보조 재활에 강력하고 신뢰할 수 있는 동력을 제공합니다.
휴머노이드 로봇용 하모닉 드라이브 액추에이터 - FAQ
이 내용은 고객이 휴머노이드 로봇 조인트 모듈과 액추에이터 시스템을 평가할 때 가장 자주 묻는 기술 및 구매 관련 질문들입니다. 주제에는 토크 선택, 감속기 비율, 모션 제어, 통신 프로토콜, 열 관리, 동적 보행 성능, 그리고 휴머노이드 로봇 플랫폼과의 통합이 포함됩니다.
이 가이드는 엔지니어, 로봇 개발자, 그리고 구매 팀이 다양한 휴머노이드 로봇 크기, 페이로드 요구 사항, 그리고 적용 시나리오에 맞는 적절한 조인트 솔루션을 더 잘 이해하고 선택할 수 있도록 돕기 위한 것입니다.
더 많은 휴머노이드 로봇 솔루션은 honpine에 문의해 주세요
HONPINE 유성 기어 모터의 내부 기어는 고강도 합금강으로 제작되었으며, 침탄 및 담금질 처리를 거쳐 표면 경도 HRC 58–62에 도달합니다. 식품 등급 윤활 그리스와 결합하여, 정격 운전 조건에서 서비스 수명은 10,000시간을 초과하며, 이는 핵심 부품 교체 없이 약 14개월의 연속 산업 운전에 해당합니다.
또한, 이 모터는 IP65 보호 등급의 모듈형 밀봉 설계를 채택하여 먼지와 액체 비말을 효과적으로 차단하므로, 식품 가공 및 자동차 도장과 같은 특수 환경에 적합합니다.
표준화된 인터페이스와 분리형 엔드 캡 설계로 인해 전체 로봇을 분해하지 않고도 유지보수가 가능하며—모듈을 직접 교체할 수 있어 가동 중단 시간과 유지보수 비용을 크게 줄일 수 있습니다.
SCARA 로봇 분류 및 6축 로봇 암 적재 및 하역과 같은 산업용 애플리케이션부터, 재활 훈련 장비 및 수술 로봇 정밀 제어를 포함한 의료용 애플리케이션, 그리고 바이오닉 로봇 보행 시뮬레이션 및 UAV 짐벌 안정화와 같은 소비자급 시장에 이르기까지, 이 모듈은 CAN 및 RS485를 포함한 여러 통신 프로토콜을 지원하여 서로 다른 브랜드의 제어 시스템과 신속하게 호환될 수 있습니다.
더 중요한 것은, 경량 설계와 높은 토크 밀도의 조합이 강력한 애플리케이션 범용성을 만들어낸다는 점입니다:
소형 모델은 UAV 짐벌에 내장될 수 있어, 페이로드를 증가시키지 않으면서 부드러운 360° 회전을 보장합니다.
대형 모델은 AGV 구동 휠에 통합될 수 있어, 중단 없는 창고 및 물류 운영의 요구를 충족하기 위해 24시간 연속 운전을 지원합니다.
산업 제조의 엄격한 정밀도 요구 사항을 충족하기 위해, 이 모듈은 헬리컬 유성 기어 감속 구조를 채택합니다. 최적화된 치면 설계를 통해, 기어 백래시는 10 arcminutes (approximately 0.167°) 이내로 제어되며, 반복 위치 결정 정확도는 ±12 arcminutes에 도달합니다.
3 kHz 고주파 제어 신호와 ≤200 μs의 응답 시간과 결합되어, 이 시스템은 정밀 전자 부품 조립 및 리튬 배터리 탭 용접과 같은 마이크론 수준 작업에서도 지연 또는 위치 결정 오류로 인한 제품 손실을 방지합니다.
고하중 응용 분야를 위해, 이 모듈은 군용 등급 강화 기어 재료와 베어링 구조를 사용합니다. 최대 토크는 36 Nm에 이르고, 정지 토크는 24 Nm를 초과하며, 이는 3.6 kg 하중을 안정적으로 들어 올리는 것과 같습니다. 이는 4족 로봇의 하중 지지 보행과 외골격 로봇의 보조 재활에 강력하고 신뢰할 수 있는 동력을 제공합니다.
로봇은 단일 다리 지지 상태에 들어갈 수 있으므로, 가장 먼 상체 페이로드에 대해 충분한 안전 여유를 확보해야 합니다.
동적 시뮬레이션은 일반적으로 질량 중심과 지레팔 계산을 기반으로 수행됩니다.
예.
키, 체중, 팔 길이, 팔 가반하중, 최대 확장 하중 조건과 같은 매개변수가 모두 필요합니다.
명확하게 정의된 페이로드가 없으면 정확하게 계산할 수 없습니다.
당사의 기존 170A 모델을 참고하실 수 있습니다.
상반신 작업 페이로드도 고려해야 합니다.
HONPINE은 다음을 포함한 여러 분야에서 강력한 시스템 수준 엔지니어링 역량을 보유하고 있습니다:
센싱 기술
에너지 시스템
모션 및 구동
산업 디자인
이러한 다학제적 통합은 휴머노이드 로봇 고객의 개발 주기를 크게 단축하며, 특히 개념 (0)에서 초기 배치 (1)까지의 과정에서 그렇습니다.
이는 통신 프로토콜에 따라 다릅니다.
프로토콜이 표준 DS402 사양을 따르면, ROS2가 지원됩니다.
전용 프로토콜은 일반적으로 지원되지 않습니다.
지연 시간은 일반적으로 마이크로초 (µs) 수준입니다.
일반적인 모터 제어 주기는 약 1 ms로 작동합니다.
HONPINE 일체형 관절 모듈은 다음을 포함하여 여러 핵심 기술을 하나의 소형 유닛에 결합합니다:
서보 제어
모터 드라이브
토크 센싱
전달 시스템
열 관리
기존 서보 모터 시스템과 비교할 때, HONPINE 솔루션은 다음을 제공합니다:
더 높은 통합도와 더 가벼운 무게
더 높은 피크 토크 출력
더 높은 정밀도와 제어 성능
HONPINE는 로봇 및 자동화 시스템을 개발하는 고객의 기술 장벽을 낮추고, 더 빠른 개발 및 배치를 가능하게 하는 것을 목표로 합니다.
반드시 그런 것은 아닙니다.
통합 드라이버가 포함된 버전은 이미 내부적으로 FOC 제어를 포함하고 있습니다.
16 kHz는 DC 모터 제어에 일반적으로 사용되는 표준 주파수입니다.
일반적으로 위치 제어가 더 적합합니다.
탄성 변형이 존재하므로, PT 모드 (위치 + 토크 동기 제어)도 사용할 수 있습니다.
HONPINE의 공장 및 기술 팀은 통합을 위한 지원을 공동으로 제공할 수 있습니다.
하모닉 드라이브 또는 유성 감속기가 사용되는지에 따라 다릅니다.
유성 감속기는 정밀도가 더 빨리 저하되는 경향이 있습니다.
하모닉 감속기도 시간이 지남에 따라 마모되지만, 정밀도가 저하된 후에도 여전히 각초 수준의 정확도를 유지할 수 있습니다.
능동 냉각 및 액체 냉각 시스템을 통해 제어됩니다.
서로 다른 매개변수입니다.
연속 토크는 지속적인 작동 토크를 의미합니다.
피크 토크는 손상이 발생할 수 있기 전의 순간적인 충격 토크를 의미합니다.
휴머노이드 로봇의 크기에 따라 다르며, 예를 들어 1.2 m, 1.4 m, 1.7 m, 또는 2.4 m 등이 있습니다.
상체의 페이로드도 중요합니다. 토크 요구 사항은 페이로드 용량을 기준으로 계산해야 합니다.
반드시 그런 것은 아닙니다.
이는 휴머노이드 로봇의 크기 (1.2 m, 1.4 m, 1.7 m, 2.4 m, etc.) 및 상체 페이로드에 따라 달라집니다.부하 요구 사항에 따라 서로 다른 토크 수준을 선택해야 합니다.
코어리스 모터는 일반적으로 축 방향 길이가 더 길고 전체 부피가 더 큰 반면, 프레임리스 토크 모터는 두께 면에서 더 콤팩트합니다.
선택은 적용 위치에 따라 달라집니다.
필요한 제어 정밀도와 적용 환경에 따라 다릅니다.
예를 들어, 산업용 핸들링과 산업용 조립은 서로 다른 정밀도 수준을 요구합니다.
적합한 백래시는 실제 적용 시나리오를 기반으로 선택해야 합니다.
하모닉 감속기를 사용하는지 또는 유성 감속기를 사용하는지에 따라 다릅니다.
하모닉 드라이브 감속비는 일반적으로 다음과 같습니다: 30, 50, 80, 100, 121, 161.
유성 기어 감속비는 일반적으로 50 미만입니다.
감속비는 전체 크기 및 구조 설계와 함께 선택해야 합니다.
로봇 조인트 모듈 사용 시 주의사항
조인트 모듈의 사전 판매 및 사후 판매 관련 사항에 대한 자세한 정보는 당사에 문의해 주십시오. HONPINE은 일대일 기술 지원을 제공합니다.
● 안전한 작동:전원이 켜진 상태에서는 케이블을 꽂거나 분리하지 마십시오. 커패시터를 분리하기 전에 완전히 방전되었는지 확인하십시오.
● 장비 설치: 설치 구조가 일체형 조인트의 무게를 지탱할 수 있는 충분한 기계적 강도를 갖추고 있으며 안전하게 장착되었는지 확인하십시오.
● 나사 체결: 모터와 구조 부품 사이의 나사를 체결할 때는 나사 고정용 접착제와 토크 렌치를 반드시 사용해야 합니다. 모터 매뉴얼에 제공된 토크 사양을 엄격히 따르십시오.
● 배선 기준: 핀 정의에 따라 엄격하게 배선을 수행하십시오. 식별 시 케이블 색상에 의존하지 말고, 적절한 저항 매칭을 सुनिश्चित하십시오.
● 전원 공급 사용: 전원 공급 전압이 일체형 조인트의 정격 전압과 일치하는지 확인하십시오. 사용자가 외부 리튬 배터리를 연결하는 경우, 정격 전압이 48V이면 완전 충전된 배터리 전압이 시동 중 60V를 초과할 수 있으며, 이는 모터 작동에 영향을 주거나 심지어 모터를 손상시킬 수 있습니다. 예방 조치에는 전압 평활화를 위한 전해 커패시터 설치 또는 공급 전압을 안정화하기 위해 모터 전원 입력에 직렬로 전압 조정 모듈을 연결하는 방법이 포함됩니다.
● 배터리 전원 공급 시스템: 배터리 구동 시스템에서는 배터리 자체가 역전류를 흡수하고 전압이 정격 한도를 초과하지 않도록 방지하는 데 도움이 될 수 있습니다.
● 스위칭 전원 공급 시스템: 스위칭 전원 공급 시스템에서는 급감속 중이거나 중력 하중에 의해 구동될 때 일체형 모터가 회생 에너지를 생성할 수 있으며, 이로 인해 DC 버스 전압이 상승하고 과전압 경보가 발생할 수 있습니다. 이를 방지하기 위해 대용량 전해 커패시터를 병렬로 설치하거나 브레이크 저항을 추가하여 전압 스파이크를 줄이는 것이 권장됩니다.
● 감전 및 압궤 부상 방지: 모터에 전원이 공급되었거나 작동 중이거나 구조 부품에 연결된 경우, 감전 또는 움직이는 구조물로 인한 압궤 부상을 방지하기 위해 절대로 손으로 모터를 직접 만지지 마십시오.
● 모터 분해: 승인되지 않은 모터 분해는 금지됩니다. 분해는 특별한 상황에서 협의 후 전문가의 지도하에만 허용됩니다. 무단 분해 시 보증이 무효화됩니다.
● 분해 후 운송: 모터를 지침에 따라 분해한 후 반송해야 하는 경우, 감속기 나사, 후면 커버 나사 및 기타 체결 부품을 포함한 모든 원래 나사가 운송 전에 올바르게 다시 설치되고 단단히 고정되었는지 확인하여 진동이나 충격으로 인한 운송 중 손상을 방지하십시오.
업계 동향





업계 동향
